Building Autonomous Robots: From Human Commands to Intelligent Actions
In this blog post, we explore how robots carry out human instructions by breaking tasks into smaller steps—from understanding commands, to planning and interacting with the world. We show how Generative AI and Reinforcement Learning enable learning from human demonstrations, how robots can handle objects of varying shapes, sizes, and orientations, and perform fine manipulation tasks.
Avsr AI (with input from SRI International)
5/14/20257 min read
Autonomous robots should be able to perform tasks with little to no human supervision. However there are several challenges that have to be solved before we can build self-operating robots like we discussed in this blog post.
Let’s consider an example scenario: a robot that must follow verbal instructions from a human to complete a task. For this to work, it is necessary to conduct several tasks so that the robot can accomplish the order. The robot must first:
Understand the command by converting natural language into an internal representation.
Plan the task by breaking it down into sequential subtasks.
Execute each subtask, often involving precise movements and interaction with physical objects.
Verify the outcome to determine if the task was completed successfully.
Each of these stages presents unique challenges that no single AI model can currently solve in isolation. Instead, multiple specialized models must work together seamlessly. In the following sections, we explore how this integration is achieved using a real-world demo.
Pick and place using natural language, Gen AI , and learning from human demonstrations
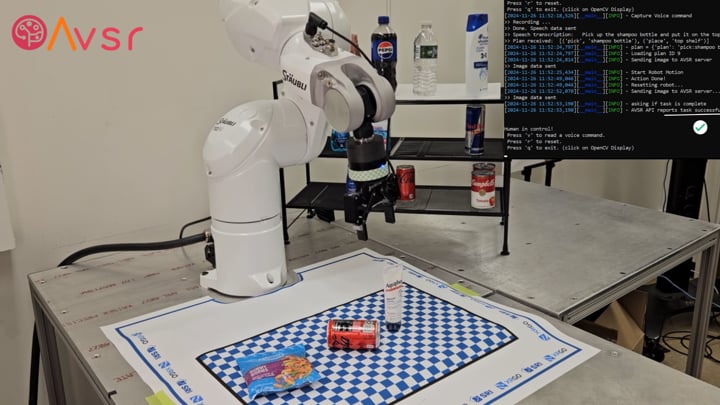
In the following video, we can see a demo of an intelligent robotic arm picking and placing items of different sizes, shapes and rigidity. This demo has been jointly developed by Avsr AI and SRI's XRGo robot telemanipulation platform; it illustrates all the steps needed to make a robot follow human instructions.
1: Understanding and Planning from Human Commands
The process begins when a user issues a spoken command in natural language — making the interaction intuitive and human-friendly. The robot first processes the audio signal using speech recognition and natural language understanding to extract a structured semantic representation of the request.
From this representation, the robot then performs high-level task planning: breaking down the overall command into a series of executable subtasks. Recent advances in Generative AI, particularly large language models (LLMs) and Vision Language Models (VLM), have made this step more efficient and scalable. In this demo, a fine-tuned LLM generates a coherent action plan from the original human instruction, effectively bridging the gap between human language and robotic execution.
2: Physical Motion Planning and Execution
With the plan in place, the robot begins executing the subtasks one by one. This is handled by a low-level motion planner, which translates each step into precise movements of the robot’s actuators.
We’ve trained the robot to identify (using Computer Vision), and pick and place items of varying shapes, sizes, orientations, and materials using a method known as Learning from Demonstrations (described in detail below). This allows the robot to generalize its behavior across different objects, even in unstructured environments.
3: Task Verification
Finally, after the robot finishes its tasks, it is necessary to check whether the order was successfully completed. This step is crucial in a real scenario because it might require to conduct any kind of corrective action, like relying on human intervention, before the robot can keep performing more tasks. In this demo, a separate verification module is used to validate the robot successfully completed the task it was supposed to do. This model uses computer vision with robot camera; other modalities or sensor data can further enhance the accuracy of a verification module.
XRGo Teleoperation and Tele-presence system
Avsr AI has been working with SRI International (link1, link2) to bring breakthrough robotics and AI research to market. XRGo from SRI International is a teleoperation and telepresence solution developed by robotics researchers at SRI. The software is compatible with both purpose-built full robots and industrial robot arm systems from popular manufacturers. The focus of this software is low latency and robust teleoperation; we have extended this system to support observation and control by automated methods, including AI.
During teleoperation, a human user wearing the VR headset is provided a 3D view of the robot work area. The hand controllers can be moved to control the robot end effector relative to the camera position. This is a simple and direct solution that maps the human’s action space to the robot’s action space, even if they are different. This also reduces the workload on the operator, who doesn’t have to translate different perspectives (is the robot facing towards or away from the user?) or memorize joint space and directions (will it move this direction if i increase the joint 4 value?). VR also gives us unlimited ability to add unobtrusive UI and tools. A user who has never operated a robot before is able to understand and begin completing complex tasks in under a minute.
Key breakthroughs of our system:
Training Data Collection: XRGo enables large-scale collection of real-world training data by recording human interactions. This is invaluable for training AI models via learning from demonstration (LfD).
Seamless Handover: Control can switch fluidly between a human and an automated system, thanks to programmatic interfaces for sensing and actuation.
Ultra-Low Latency: The user-to-robot control latency is an important factor in tele-op systems; most systems struggle with high latency that makes the tele-op unnatural. With sub-10ms latency, the XRGo system provides real-time feedback indistinguishable from direct control. A user can also configure robot motion smoothing and acceleration/velocity limits, which can add safety at the cost of perceived delay
Hardware Agnostic: Our system supports a wide range of robotic platforms, enabling AI models trained in one environment to generalize across others.
Learning from demonstrations (LfD)
Reinforcement Learning (RL) has been extensively used in different environments to train a robot to perform tasks autonomously. Although this paradigm can provide robots with a great degree of autonomy there are some drawbacks that limit their application. First, RL requires some policy to start with (usually a random policy when starting “from scratch”.) and an enormous amount of data for a policy to converge. Oftentimes, it learns from both failure and success episodes. This is not a problem in simulation but it raises serious concerns of safety and practicality in the real-world. The cost, in terms of money and time, may make unpractical to use RL models in some complex scenarios. Besides, RL requires a well-defined reward function that is measurable. In general, it is hard to find the right reward function for every task. In real life, the reward is very hard to evaluate even if it is well-defined.
Imitation learning or learning from demonstrations (LfD), on the other hand, is a powerful technique to teach dexterity and other skills to robots. This method is based on observing a human performing a task and then building a model that can emulate their skills. We can record the trajectories of an operator controlling the robot and use this data to train a model that captures the operator behavior. LfD offers several advantages over pure RL models. First, it is able to generate a reasonable policy with a very small set of demonstration data. Second, reward functions are not necessary and it does not require failure examples to learn. Besides, if demonstration data is readily available and abundant (e.g. human driving dataset for self-driving cars), LfD models can be cheap to produce. However, this is not the case for dexterous tasks in robotics and, although several datasets are available for research purposes, using specific data, collected in the same environment and conditions as the real task to be solved might be necessary to guarantee a successful deployment of an autonomous robot.
In the recent years, deep learning methods and generative AI have made it possible to produce robust policies based on LfD approaches. One example is Diffusion Policy (DP) [1], based on diffusion models, originally developed in the image generation domain, which can be also applied to policy learning in the action/trajectory space. DP is a generative model, which means that it can learn the distribution of some data and then be able to generate new samples from this distribution (e.g. image generation, where the model learns how to produce new images from a real-image dataset). When applied to motion planing in robotics, the model tries to capture the probability distribution of the robot joint positions conditioned to the observations (typically, the robot current state and the images captured by the cameras)
This model works by iteratively adding noise to the samples and then learning how to remove the noise from them. This allows the model to capture the entire data distribution of the training samples instead of just learning the dominant samples in the dataset. In the case of learning robot trajectories from human demonstrations this means that the model will be able to learn multiple modes to solve a task while making sure that the model will commit to just one mode during inference.
Extensions and Future Research
There are interesting extensions to this base model. For instance, in [2], a diffusion policy for goal-conditioned Lfd approach is proposed. The basic idea is to train a versatile policy able to achieve different goals (unlike in “vanilla” diffusion policy where the model is trained on a very specific task). Also, in [3] a method is presented where preexisting planners are used to generate high-quality demonstrations that are employed to train a diffusion policy for bi-manual manipulation. There are also approaches that can learn a diffusion policy using data from a very specific task and generalize to new tasks (zero-shot learning) with high accuracy [4]. In [5] a Vision Language model is used to analyze both the task description and the image observation to generate a set of key steps that have to be followed to accomplish the task. The VLM is also used to mark the key points in the observation (image) that are relevant for the task (for instance, the grasp point for an object).
Moreover, to achieve robust robot dexterity, especially when handling objects with diverse physical properties, integrating tactile feedback into policy learning is crucial. Relying solely on visual information limits a robot's ability to discern the necessary interaction forces for grasping and manipulating items of varying rigidity and texture, as shown in [6, 7]. These work show that tactile-conditioned diffusion models can learn nuanced manipulation behaviors, like adjusting grip strength based on texture or object deformation, even when visual input is absent or occluded. This is essential for reliable and fine-grained control, especially in cluttered or visually ambiguous environments.
Conclusion
Building robots that can understand and carry out human commands requires a symphony of capabilities — language understanding, planning, control, perception, and verification. By combining natural language models, generative policy learning, and intuitive teleoperation platforms like XRGo, we move closer to autonomous robots that are not only intelligent, but truly useful.The integration of tactile sensing, goal-conditioned planning, and vision-language understanding represents the next frontier — one where robots can adapt, learn, and improve continuously in real-world settings.
References
[1] Diffusion Policy: Visuomotor Policy Learning via Action Diffusion, https://diffusion-policy.cs.columbia.edu
[2] Goal-Conditioned Imitation Learning using Score-based Diffusion Policies, https://arxiv.org/abs/2304.02532
[3] Planning-Guided Diffusion Policy Learning for Generalizable Contact-Rich Bimanual Manipulation, https://arxiv.org/pdf/2412.02676
[4] Generalizable Robotic Manipulation: Object-Centric Diffusion Policy with Language Guidance, https://openreview.net/forum?id=KsLzUjozIe
[5] DISCO: Language-Guided Manipulation with Diffusion Policies and Constrained Inpainting. https://arxiv.org/pdf/2406.09767
[6] 3D-ViTac: Learning Fine-Grained Manipulation with Visuo-Tactile Sensing, https://arxiv.org/pdf/2410.24091
[7] TacDiffusion: Force-domain Diffusion Policy for Precise Tactile Manipulation, https://arxiv.org/abs/2409.11047